
The dome pot will cause some issues. I might add a switch in to tell the master that it is in RC mode to ignore the PS2 sticks and turn off the dome pot code etc. But it is only for emergencies so shouldn't really be needed.
I started by finding a spot and looking at the leads needed. So i made up a bypass lead, One Male pinned 5 way block, combining the 3 pins for the feet control (S1, S2 and GND) for the Sabertooth and the 2 for the Syren (S1 and GND) all fed to to 3 x 3 pin connectors to fit the reciever. I also added a 2 way connector on the Sabertooth signal lines, so i could swap the inputs if needed. In theory that was the ESCs connected. :)
Before trying to wire up i needed to rig the relays to stay on and allow the feet signals to pass. Luckily the dome needs a GND to switch and the Feet need a 5v (both feet are shared signal). So i removed the two 2 way connectors that power and control the relays and pugged them into the bus instead. :)
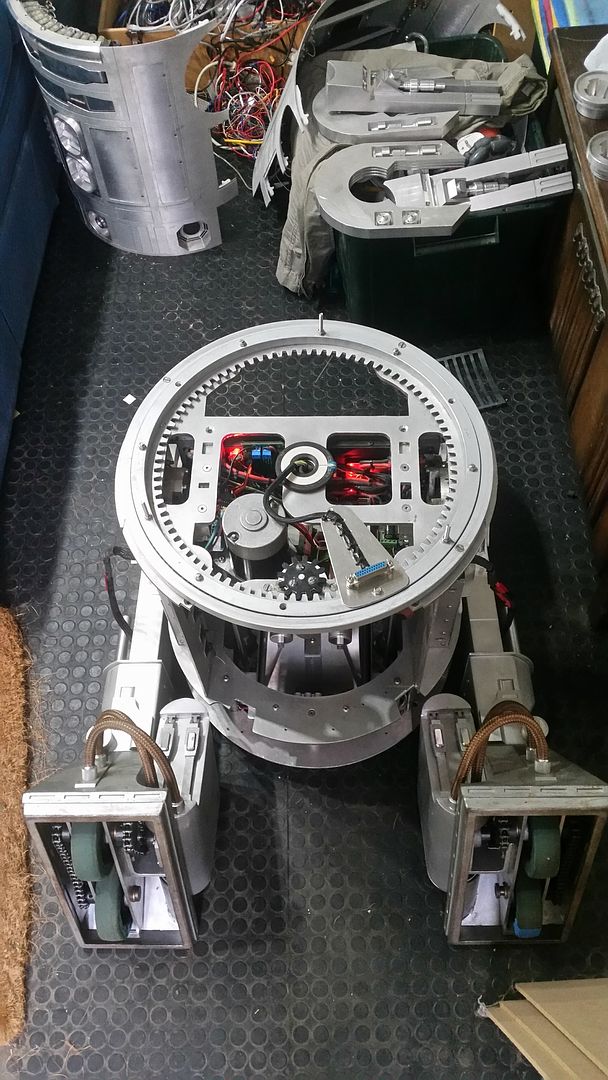
Relays rigged and ESCs connected. Receiver powered from the 5v bus and start testing the RC. :)



The leg wire setups allow for easy wheels up testing. :)
So the leads/pins that change are:
Sabertooth - Arduino shield D8, D9, GND move to RX
Syren - Arduino shield D10, GND move to RX
Relays - Arduino shield GND, 5v, D13 (to GND), D12 (to 5v) move to 5v bus
RX Power - 5v, GND - Connect into 5v bus
So that is it, a 5 minute swap to RC, and 3 mins back to BHD. I had a dummy run. :) Hope not to need it, but if i do it is there. :)
Just the pesky volume to fix again now, and it is back on with upgrades. Sure Electronics have started selling the old style volume knobs again, so i wont have to use the wrong one this time. :) That should be here next week. :)
No comments:
Post a Comment