I was asked about the 2-3-2 shoulder/leg setup, i hadn't blogged it here so thought it worth a look.
My setup allows the legs to be removed, he couldnt be lifted or put in the car without this, but i liked the leg rod approach, so this is what i ended up with, the first lot of pohotos are old, i will add the updates at the bottom, the theory is the same its just been refined a little. :)
With the centre hubs removed (attached with magnets) 4 M6 hex head bolts go into the satelite brackets, and the wires are fed through the lower hole. It allows for just enough movement for the 2-3-2 :)
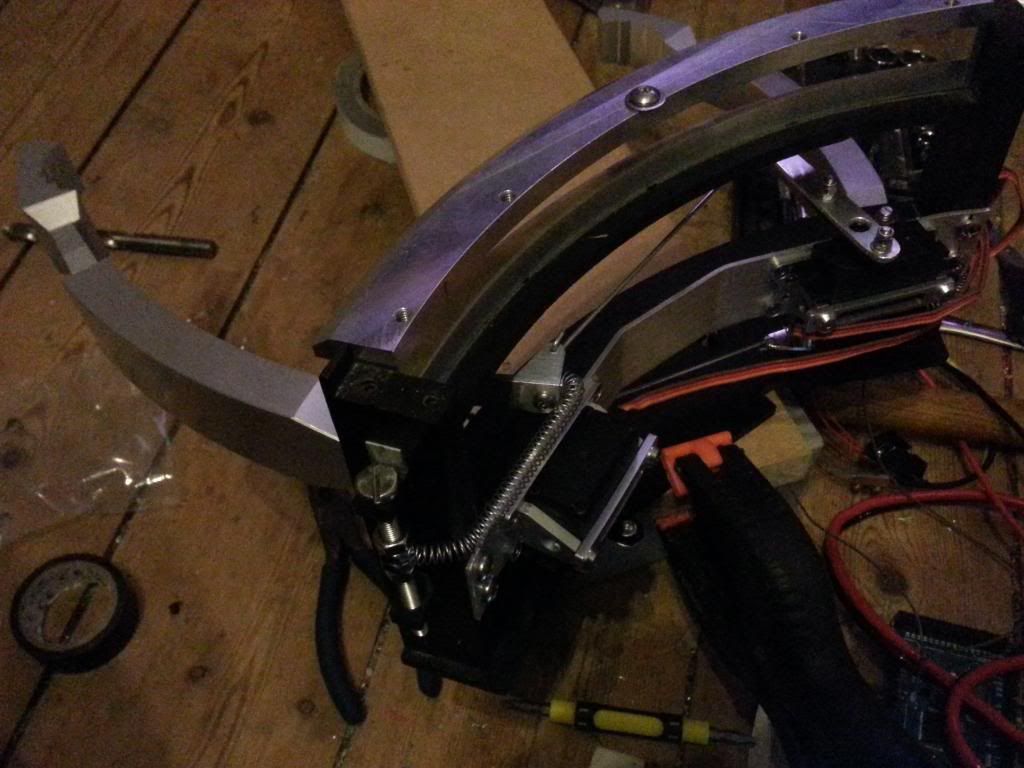
2 x 10mm studs go from a plate in the leg through the leg to body hubs into the satelite motor frames, the studs go through the alu frame and the 12mm plastic and that hole is backed by 2mm alu. The stud plate is then stepped back inside the leg to body hubs and the leg rod is attached to run down the interior back surface of the leg.
Brackets have been lightened, shoulders reinforced and arms added to the brackets. The arms hit plates in the frame in 3 leg mode, this was to help reduce the forces transferred into the actuators.
The hubs were cut to allow the studs room.
And the back of the Jag Leg was popped out.
You can see here how it all bolts up.
May as well add the Hub mount here too while im at it. You twist it to release one magnet and then it can be removed, with both on the steel it's going nowhere. :)
It all fits, but the shoulder hubs sit approx 1mm proud.
The leg rods are bent in a slight step in the leg, to allow it to exit at the right spot to align with the u-channel of the foot, but inside the foot.
I went for a 20mm top and 40mm bottom offset, and my control rods are bent in the leg to step up to the exit hole, this avoids the bolts.
The rods are stainless steel, this was to help avoid the attraction of magnets in the back of the hubs. So that was the first draft and concept proved, but it needed work, more to come too.
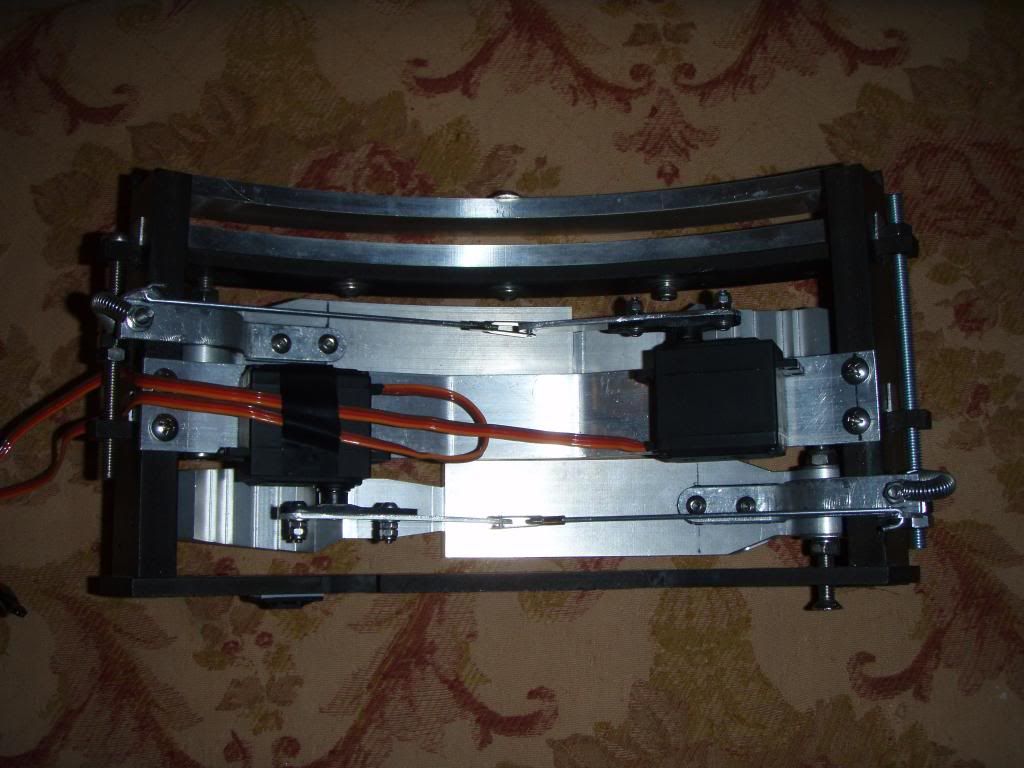
Mike Bentley kindly had some nice little brass bits made, they have an M4 thread all the way through, the feet and rod, or shoulder plate and rod slip over the brass and it acts like a bearing withthe help of an M4 nut and bolt and a few washers. That made a BIG difference, but still had a bit of play.
So I then went back and added bearings to the hinge point in the centre of the mech. 2 6mm id flange bearings and it was a lot firmer.
But it still had my home made studs, rubbish, they kept coming lose. So
James took up the challenge and redid the studs for me. Beautiful. :)
Next job is to redo the mounts for the actuators, both top and bottom, take out all the play there. Then i need to redo the code, all the balance points have changed thanks to the firm up and the battery install. So i will wait and redo the timings once i have the skins on.